

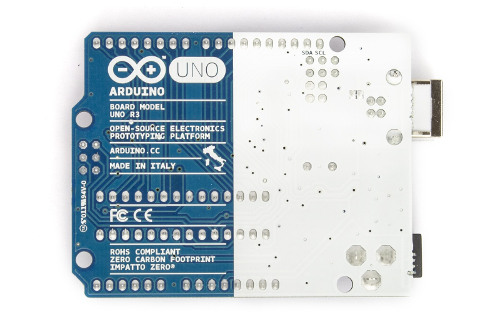
Inizialmente volevo comprare componenti già assemblati e ben noti al mondo dei droni per poi assemblarli, ma poi ho pensato di andare oltre e dopo qualche ricerca ho cominciato a scegliere i componenti che costituiranno il “core” del mio drone. Dato che questo rappresenta il mio primo progetto per la realizzazione di un drone, ho preferito cominciare a comprare componenti economici dalle basse prestazioni, per potermi focalizzare su quelli che sono i vari aspetti legati alla progettazione e per meglio comprendere tutte le difficoltà legate ai vari processi della produzione di questo drone. Ho quindi cominciato con l’acquistare una scheda madre ARDUINO UNO Rev 3, il suo prezzo si aggira intorno ai 20€, ma se ne possono trovare anche di parallele con prezzi nettamente inferiori.
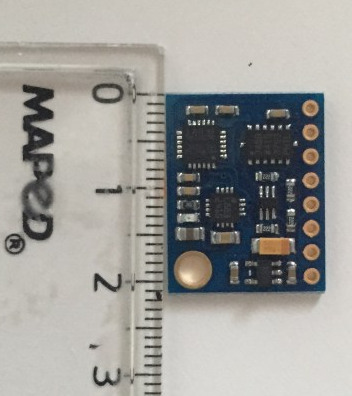
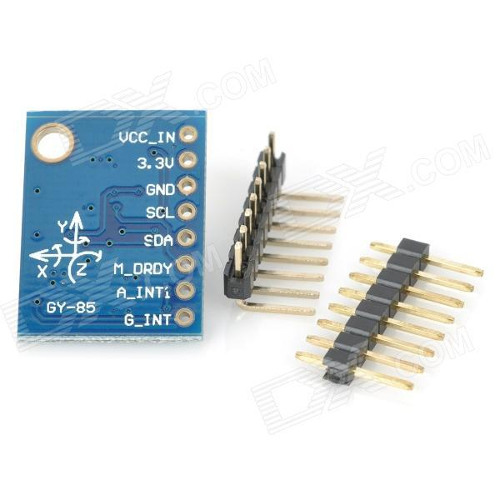
Monterò su questa scheda madre, una piattaforma inerziale nota col nome di GY-85. Questa scheda, abbastanza economica e dalle scarse qualità inerziali del valore di circa 15€, servirà per rendere un minimo evolute le caratteristiche di auto-navigazione del mio drone, infatti, questa scheda è dotata di un accelerometro, un giroscopio e un magnetometro che consentiranno al drone di poter correggere i moti di Roll, Pitch e Yaw.
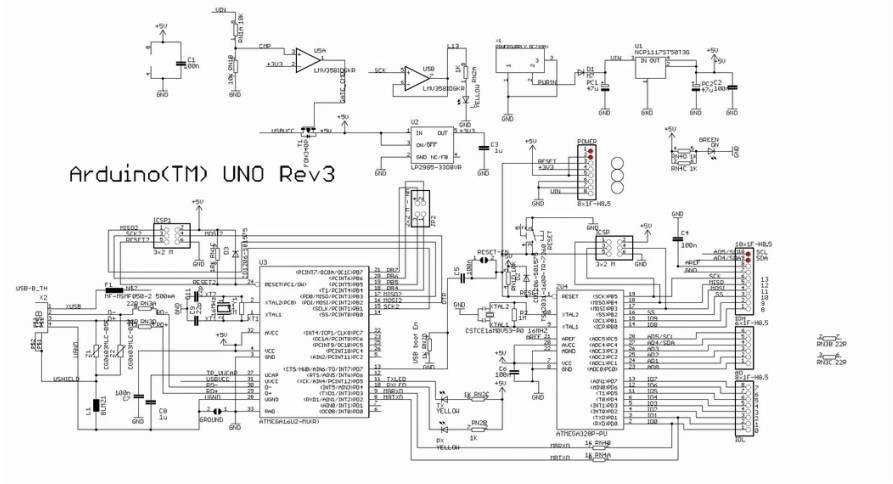
1) ASSEMBLAGGIO SCHEDA ARDUINO UNO R3 CON SENSORE IMU GY-85.
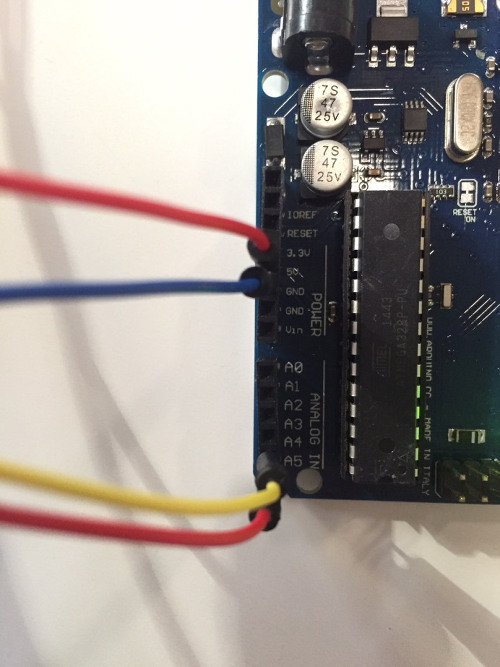
Dopo aver provveduto all’acquisto delle due schede e dei fili di connessione necessari, comincio il montaggio dei componenti. Assemblare le due schede, per chi ha un minimo di praticità con il saldatore, è un gioco da ragazzi. Occorre utilizzare dei semplici fili per collegamenti elettronici. Bisogna collegare i pin SCA, SDL, GND che trovate stampate sul fondo di entrambe le schede elettroniche. Il quarto filo da collegare è quello dell’alimentazione, dovete collegare il pin di 5 V della scheda Arduino con il pin VCC_IN della scheda IMU. Per maggiori dettagli vi rimando ai datasheet delle due schede.
Quando avrete realizzato l’assemblaggio delle due schedine avrete una configurazione delle schede simile alla mia.



Realizzato l’assemblaggio fisico, sarà la volta della fase di programmazione. Andate sul sito di Arduino, nella sezione download e scaricatevi il software adatto al vostro sistema operativo. Scaricato questo primo software, sarà la volta del software Multiwii che troverete sul sito Multiwii.com , nella sezione software. Scaricherete una cartella zippata col nome multiwii all’interno della quale troverete il codice del programma da interfacciare con la scheda arduino e la imu scelta, andrete quindi a copiarvi questi programmi all’interno di arduino mediante il software dedicato. Quando avrete terminato la fase di compilazione del programma all’interno della scheda arduino, chiudetelo e aprite il programma multiwii conf . All’interno della sezione PORTE selezionate la porta che contiene la vostra scheda arduino, successivamente premete il tasto READ e poi il tasto START. Muovendo la scheda imu comincerete a visualizzare i movimenti letti.
2) MONTAGGIO KIT DJI FLAMEWHEEL F 450 (FRAME – MOTORI – ELICHE – ESC ).
Con il seguente video riporto come effettuare un corretto montaggio della struttura del drone tenendo in considerazione anche del verso di rotazione dei motori. La configurazione da me scelta per la realizzazione del mio drone è la classica configurazione X4. Ho scelto di acquistare il Kit della Dji flamewheel f 450 che comprende telaio, motori, esc consentendo di risparmiare qualche euro.
Fonte: http://www.giuseppealferi.com


